|
魚群探知機とはその名の通り、魚群を探知するための機械であり、漁獲を目的とする漁船にとって必須のツールであることは広く知られている。そしてこの魚群探知機が進化して、高性能・小型化・低価格化が進んだことで、レジャー用途への普及が進み、マリンレジャーの花形であるプレジャーボートにも広く普及するようになった。最近はプレジャーボートへの搭載比率が50%を超えると見られており、車へのカーナビ搭載比率をはるかに上回る成長を見せている。
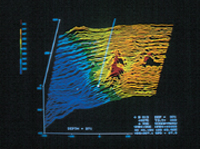
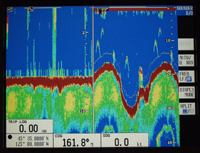
プレジャーボートに魚群探知機を搭載することは、魚釣りに有利なだけではない。海の中に魚がいるかどうかはもちろん、海底の様子が克明に把握できる。つまり魚群探知機を利用すれば、船上にいながら海中や海底の景色が楽しめるということで、マリンレジャーの楽しみが倍加する。
今やプレジャーボートの必需品となった魚群探知機だが、釣り人やボートオーナー以外には馴染みが薄いことも事実だ。魚群探知機の基本的な仕組みは超音波によって海中を探るというもので、電波が届かない液体中を駆け巡る超音波には大きな魅力と可能性がある。そこで魚群探知機を楽しみながら、超音波の魅力に迫ってみよう。
超音波を利用して海中を探査するという発想は、英国の豪華客船タイタニックが処女航海で沈没して多数の死者を出した1912(明治45)年に始まるといわれている。この不幸を繰り返さないために、全体の90%が海中に没している危険な氷山を前もって回避すべく、超音波を使って氷山を見つけようという試みが開始された。
この試みが実用化に結びつくのは、真空管が実用化される17(大正6)年以降のことだ。第一次世界大戦でドイツの潜水艦に苦しめられたフランスが、19(大正8)年に超音波振動子を開発、その反射波を検知して海中の物体の距離を判断するエコーサウンダー(音響測深機)が実用化されるようになった。
その後の第二次世界大戦では、電波で空中の物体を探すレーダーや、超音波で海中の物体を探すエコーサウンダーの能力は大いに向上したものの、レーダーもエコーサウンダーも実用という面ではまだまだ不十分な能力でしかなかった。日本海軍の秘密兵器とされた音響測深機「探信儀」でさえ、数千トンの鉄塊である潜水艦の艦影を見つけるのは至難の技であったと言われている。
ここで音波(超音波)と電波の違いを見ておこう。音波も電波も振動の波によって伝達していくことは同じだ。しかし音波が空気や液体、固体など、媒体を振動させることによって伝わる波であるのに対して、電波は電界と磁界が交互に振動しながら空間を伝わる波であるという点が大きな違いだ。つまり、音波の伝達には何らかの媒体が不可欠なのに対して、電波の伝達に媒体は必要なく(むしろ媒体がない方がより正確に伝わる)、大気がない真空中でも伝達することができる。
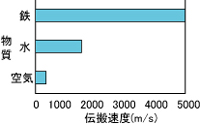
この本質的な違いからさまざまな差異が生じる。電波は1秒間で30万kmという速さで伝わるのに対して、音波は大気中で約340m、水中で1500m、鉄中でも5000mと比較にならないほど遅い。しかしこの速度の遅さは、反射波の時間差を測定しやすいという利点もある。
電波が水中を伝わらないのは、水が電気を通す導体であり電界も磁界も生じないからだ。だからいくら出力を上げても、電波は水中では伝わらない。そのため水中における伝達手段としては音波が唯一の手法となる。人工衛星との交信が電波に頼るしか方法がないのと同様に、水中では音波に頼るしかない。つまり電波と音波の両方を利用する事によって初めて、全地球レベルでの通信が可能になるというわけだ。
|
|
固体の密度によって超音波の伝達速度が異なることを利用した骨密度測定装置 |
そもそも「超音波」とは何だろう?
音波と超音波については、人間の耳で聞こえる周波数(一般的には20Hz〜20kHz)を音波と呼び、それ以上の周波数の音波を超音波と呼ぶが、周波数の違いだけで本質的な違いはない。しかし超音波は、人間の耳で聞こえる音波よりも波長が短く、直進する傾向が強い。更に細いビームにして1点に集めることが容易だ。また周波数が高いということは、音を短い時間で区切れる、つまり時間的に短いパルス音が作りやすいということで、同じ時間でより多数の超音波が発射でき、対象物のより正確な把握が可能になる。これらが魚群探知機や医療診断などで超音波が使われる理由だ。
もともとは潜水艦を見つけるための音響測深技術を魚群探知に応用するという試みは、古野電気の初代社長となる古野清孝氏が第二次大戦直後の1945(昭和20)年に発案したもので、「魚群探知機」という名称も同氏が考えたものだ。
「潜水艦が探知できるのだから魚も探知することができるはず」という発想は、すでに魚群探知機が常識化している今から見れば当然だが、当時はとんでもない発想であった。日本海軍の技術の粋を集めた、潜水艦探知のための「探信儀」が数千トンもの鉄塊でさえ検知するのが難しいのに、潜水艦に比較すればはるかに微小な、しかもほとんど水分からなる生身の魚が超音波を反射するはずがない、というのが当時の専門家の意見だった。
しかし光も通じない電波も通じない海中で魚を探知するには、超音波を水中に発射してその反射波を聞くこと以外に方法はない、との強い信念から、古野清孝氏が魚群探知機第一号を完成したのは47(昭和22)年のことだ。
音響測深機は一方で、本来の目的である水中物体探索の能力を高めながら「ソナー」として潜水艦探索以外にも利用され始めていた。しかしもともとソナーは潜水艦のように巨大な鉄のかたまりを探知するためのものであり、魚のように小さく柔らかいものを検知するという発想がなく、事実その当時のソナーでは魚は全く映らなかった。
そこで考えられたのが、「超音波センサーの感度を大幅に引き上げることによって、反射波が極めて微小な物体に対しても検知できるようにする」(古野電気船用機器事業部営業企画部課長・上村貴典氏)ことだ。
しかし「感度を上げることはさまざまなノイズを拾うことにつながります。船の揺れ、風や波の音、エンジン音その他さまざまなノイズの中から、海の中の魚群の反射波だけをいかに抽出するかが最大の課題」であった。さまざまなノイズの中から求める物体のエコーだけをどのようにして抽出するか、これを実用のレベルにまで引き上げたことがプロの漁師に魚群探知機を認めさせた最大の要因だが、これは現在もなお、魚群探知機開発の永遠のテーマでもある。
|