エヌ・ティ・ティ・コムウェア株式会社(本社:東京都港区、代表取締役社長:栗島 聡、以下 NTTコムウェア)は、国営平城宮跡歴史公園(奈良県奈良市)にて実施する社会実験「平城宮跡歴史公園スマートチャレンジ」において、四足歩行ロボットと画像認識AI「Deeptector®」(https://www.nttcom.co.jp/deeptector/)等を活用し、公園維持管理のスマート化をめざす「自動巡回点検検証」を2021年2月より実施します。
国営平城宮跡歴史公園では、AIやIoTなどの新技術を活用し、公園の抱える課題の抜本的な解決や、公園利用者サービスの創出などによる一層の魅力向上をめざし、産学官コンソーシアムのもと社会実験を実施しています。NTTコムウェアは、四足歩行ロボットの自動巡回による画像データ収集、AI画像解析技術、デジタルツイン仮想空間の可視化技術を組み合わせ、人による点検の難しいエリアを含む公園全体の建物や設備の点検、植生状況や外来種の繁殖状況の把握、体調不良と思われる来園者の検知等、公園維持管理業務の高度化をめざし、社会実験に取り組んでいます。2021年2月に四足歩行ロボットを自動運転化し、公園維持管理業務を効率的・効果的に実施するユースケースの実現をめざす「自動巡回点検検証」を実施します。
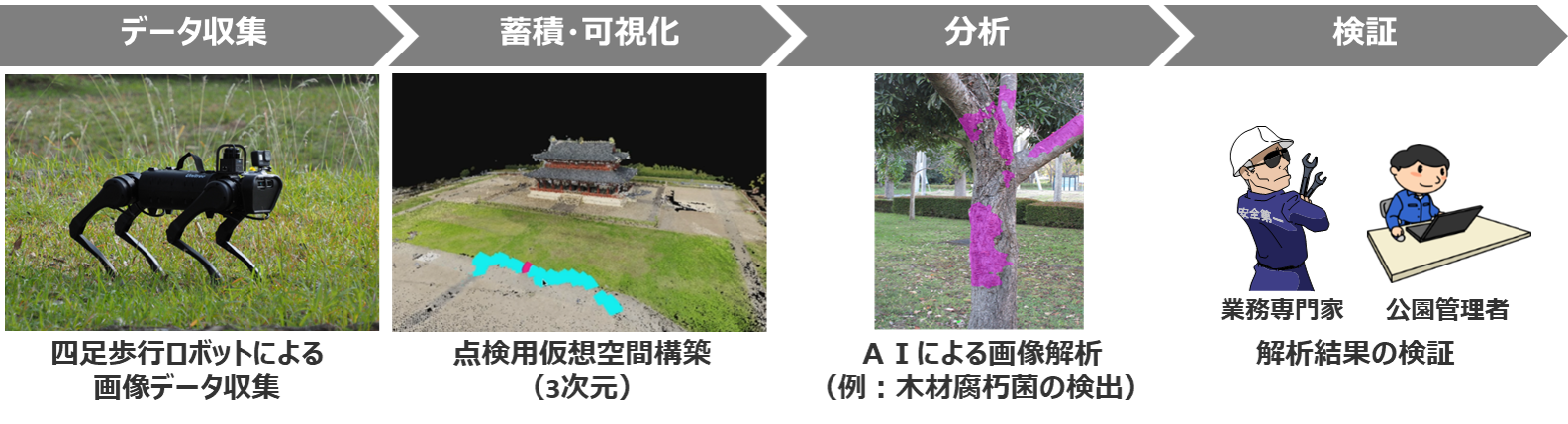
図1 四足歩行ロボットを活用した「自動巡回点検検証」のイメージ
NTTコムウェアは、モビリティやドローン等から収集したデータとAIを活用することで、都市における社会的課題の解決を支援し、スマートシティの実現をめざします。
1. 平城宮跡歴史公園スマートチャレンジとは
平城宮跡歴史公園スマートチャレンジは、国営公園を舞台としてAI やIoT などの新技術を活用し、公園の抱える課題の抜本的な解決や、公園利用者サービスの創出などによる一層の魅力向上をめざして取り組んでいます。
1300年前には日本の首都(の中心)であり、当時最先端の場所であった特別史跡・世界遺産「平城宮跡」において、従来からの文化財・歴史的資産としての適切な保存を図りつつ、平城宮跡歴史公園の飛躍的な魅力向上を図るため、当公園での社会実験の結果等を踏まえ、新技術の水平展開を促進することをめざしています。(https://www.kkr.mlit.go.jp/asuka/heijo/psc/)

2. 「自動巡回点検検証」の目的
公園維持管理業務を効率的・効果的に実施するユースケースの実現をめざし、自動運転の四足歩行ロボット巡回による効率的な画像データ収集、AI画像解析技術、デジタルツイン仮想空間の可視化技術を組み合わせた「自動巡回点検検証」を実施します。

3. 「自動巡回点検検証」検証期間・場所・内容
| (1)期間 | 2020年2月中旬〜3月(予定) |
| (2)場所 | 平城宮跡歴史公園(https://www-1.kkr.mlit.go.jp/asuka/heijo/index.html) |
| (3)検証内容 | 公園維持管理業務の自動化に向けて、点検しづらい植生エリアや立ち入ることが困難な調整池近辺、体調不良と思われる来園者・ごみや落し物の発見、倒木・落枝につながる樹木の危険予兆(木材腐朽菌の発生等)など、広域な園内の維持管理業務を、自動運転四足歩行ロボの巡回による効率的な画像データ収集、AI画像解析技術、デジタルツイン仮想空間の可視化技術を組み合わせて実現するために、検証を行います。 |
① 平城宮跡歴史公園の仮想点検空間構築
ドローン空撮画像のSfM※1処理や設置型LiDAR※2で習得した3Dモデルを統合し、クラウド上に仮想点検空間としての「デジタル平城宮跡歴史公園」を構築します。

図2 デジタルツイン空間による可視化
② 四足歩行ロボットを活用したデータ収集/AI画像解析
自動運転の四足歩行ロボットが巡回して撮影したデータをクラウド上にある仮想点検空間に取り込み、写真に付与されたGPSの位置データから「検証内容①」で構築した3D空間上に撮影点を表示します。また、収集されたデータをAIを用いて画像解析をすることで、公園内の不具合事象を抽出します。
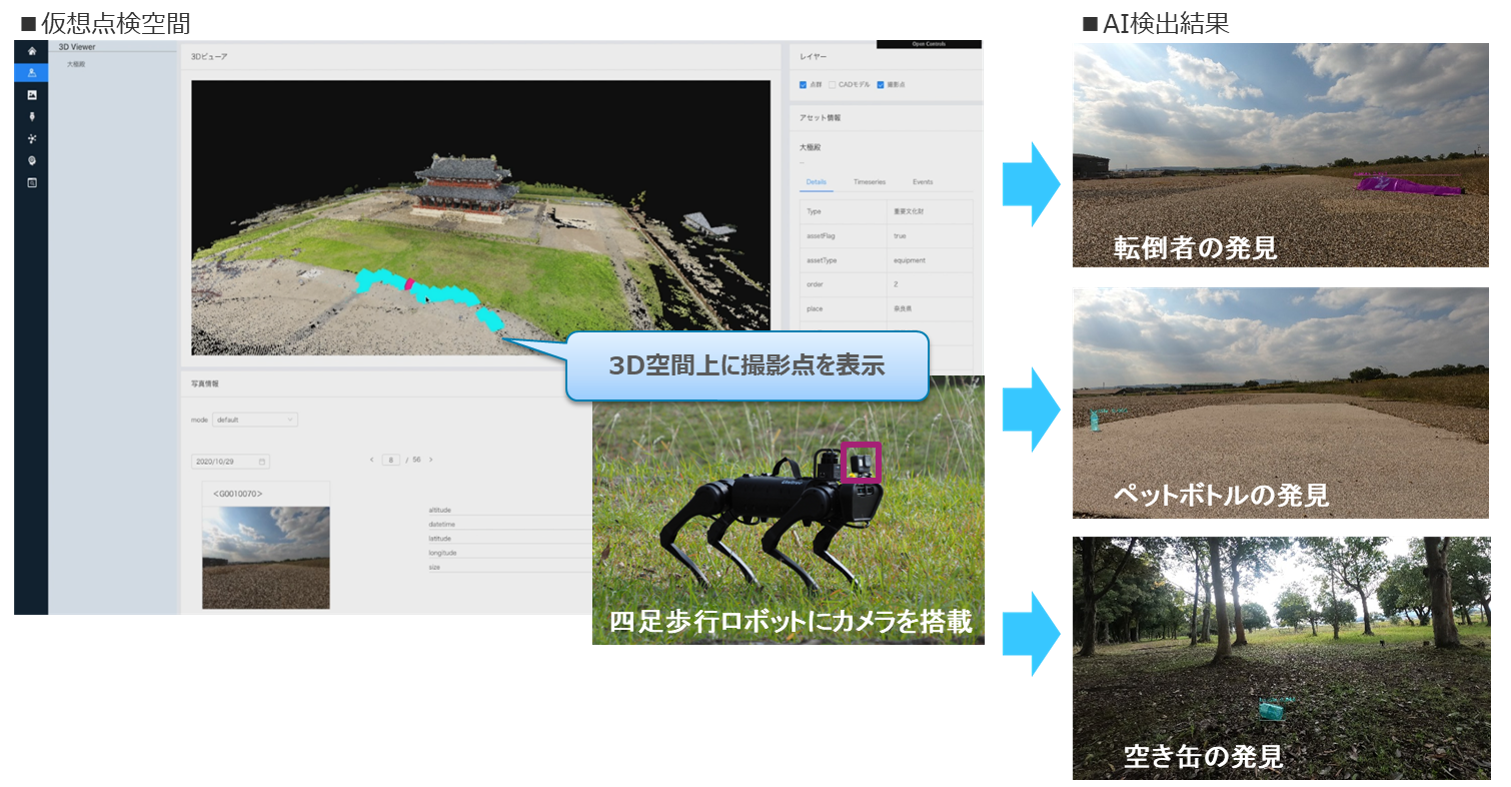
図3 四足歩行ロボットとAI画像解析技術
| ※1 | : | SfM(Structure from Motion) ドローンによる空撮写真から三次元点群データを得る自動作成手法です。原理的には、計測対象を様々な位置/角度から撮影した画像を大量に用意し、写真同士の対応関係を(ソフトウェア)解析することで、計測対象物の三次元点群データを獲得します。 |
| ※2 | : | LIDAR(Light Detection and Ranging、Laser Imaging Detection and Ranging) レーザー光を対象物に照射してその散乱や反射光を観測することで、対象物までの距離を計測したり対象物の性質を特定したりする、光センサー技術です。 |
【関連リンク】
画像認識AI Deeptector ホームページ
画像認識AI「Deeptector®」「領域判定型」提供開始プレスリリース 2020.10.13
画像認識AI「Deeptector®」「正例判定型」提供開始プレスリリース 2018.09.27
※その他、記載されている会社名、製品名、サービス名は、各社の商標または登録商標です。